Cooperative Urban
Mobility Portal
Explore Connected and Cooperative Mobility

Cooperative
Urban Mobility Portal
Explore Connected and Cooperative Mobility
Blind Spot Detection (BSD)
Emergency Vehicle Warning (EVW)
Flexible Infrastructure (FI)
Green Light Optimal Speed Advisory (GLOSA)
Green Priority (GP)
In-Vehicle Signage (IVS)
Motorcycle Approaching Indication (MAI)
Road Hazard Warning (RHW)
Road Works Working (RWW)
Signal Violation Warning (SVW)
Warning System for Pedestrian (WSP)
WSP in Barcelona
The number of bicycles and scooters in Barcelona is growing and accidents involving them are increasing. Many of those happen in intersections with low visibility. The Warning System for Pedestrians and VRUs alerts car (or larger vehicle) users to the presence of VRUs in such dangerous scenarios.

Sample Data Description
For the evaluation of the WSP service deployment in Barcelona, the relevant log items are the denmaction, denmevent and CAM log files. All of these log files are automatically recorded by the PID of the user. The denmevent logs contain the basic information for each event (e.g. timestamp, log_stationid, eventcausecode etc.). The denmaction logs contain the status of the HMI and thus record the information that was presented to the driver at each moment in time with a frequency of approximately 1Hz. The following fields are particularly relevant for the RWW service:
- Warningdistance: indicating the distance to the event location
- Servicecategorycode: indicating the message displayed on the HMI
- Pictogramcategorycode: indicating the pictogram displayed on the HMI
The eventcausecode field from the denmevent tables, in combination with the servicecategorycode and pictogramcategorycode fields from the denmaction tables, enables the evaluator to differentiate between the different services using the same message types (DENM). The following combinations of values defines the WSP service deployed in Barcelona:
| Service | DENMevent causecode | DENMaction servicecategorycode | DENMaction pictogramcategorycode |
| WSP | == 97 | == 13 | == 815 |
The CAM logging is mainly used to derive the vehicle position, speed and acceleration for the entire duration of the event, also at a frequency of approximately 1Hz. For a more in-depth description of the logging format and the data fields in each log type please visit Open Common Log Data Format.
The example data set provided here consists of all WSP events logged in Barcelona. The data set includes both baseline and treatment events. ‘Baseline’ indicates that the service was not active (no information was presented to the driver) and is used as a point of reference, whereas ‘treatment’ events are logged when the service is fully functional. Separating events by baseline/treatment is possible by analyzing the content of the denmaction log files and, more specifically, by checking for the existence of rows where eventmodelid==6 (indicating that certain information was displayed on the screen). The App by IDIADA deployed in Barcelona randomly switches between baseline/treatment with pre-defined probabilities (percentage of baseline events is 25%). Therefore, the example data set provided here consists of roughly 70 valid treatment events and 25 baseline events.
To simplify the provision and processing of data, all denmaction logs are grouped into one iviaction.csv file, all denmevent logs into one ivievent.csv file and all CAM logs into one CAM.csv file. Individual events can be identified through unique combinations of the (log_stationid, eventid) fields. As defined in the log format specification, each event should begin with eventmodelid=5 and eventactionid=1 and end with eventmodelid=5 and eventactionid=3. In case there are multiple instances of these combination for one event, the first (5,1) and (5,3) are used to define the start and end of the event.
You can download the log data here.
Evaluation Results
Several indicators can be used to evaluate the impact of WSP on the traffic flow, mainly in terms of safety. The following table briefly describes some of the main indicators. WSP is expected to decrease the mean speed of the vehicles. Furthermore, it should increase the maximum deceleration (since these are negative values it is a decrease in absolute terms) and decrease the frequency of hard braking, since drivers should be more aware of the vulnerable road users they might encounter.
| Short name | Long name | Unit | Description | Expected effect |
| maxdeceleration | Maximum deceleration | m/s2 | The maximum deceleration (in m/s2) with which the vehicle is breaking during the event. | increase |
| ishardbraking | Hard braking | bool | Bool variable indicating whether there is any deceleration greater than 3 m/s2 | decrease |
| meanspeed | Mean speed | km/h | Mean speed of the vehicle during the event | decrease |
| maxspeed | Maximum speed | km/h | Maximum speed of the vehicle during the event | decrease |
| initialspeed | Initial speed | km/h | Spot speed of the vehicle at the point in time where the event / logging starts | n.a. |
| percspeed_5 | Percentage speed 5s | % | Percentage of the vehicle spot speed at 5s after the first HMI notification compared to initial speed | decrease |
| … | … | … | … |
The evaluation results data set provided here also contains a table with the above-mentioned indicators calculated for each event. The overall impact of WSP can then be calculated by grouping events by baseline/treatment and comparing the indicator averages over both groups. The following table gives an overview of the main indicators as extracted from the sample data. Since the overall number of events considered is low, the results are not statistically significant. Maximum deceleration values seem to decrease slightly when using the service. The mean speed also increases, but this might be a direct consequence of the initial speed also being higher in treatment. The percentage speed 5 seconds after the first HMI notification is lower in treatment (but still higher than 1, indicating acceleration rather than braking), showing that drivers react positively to the message being shown.
| Indicator | Baseline mean (n=25) | Treatment mean (n=69) | Percentage difference |
| maxdeceleration | –0.50 | –0.61 | –21% |
| ishardbraking | 0 | 0.01 | inf |
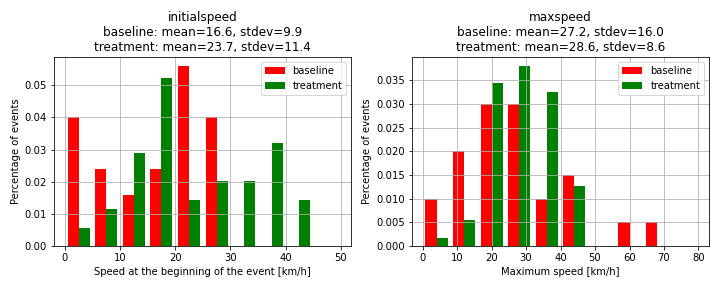
| meanspeed | 20.26 | 23.76 | +17% |
| maxspeed | 27.22 | 28.59 | +5% |
| initialspeed | 16.58 | 23.75 | +43% |
| Percspeed_5 | 1.36 | 1.02 | –25% |
| … | … | … |
To better understand and evaluate these indicators, the mean values are not enough. The probability density functions (PDF) of the indicators for baseline and treatment should also be considered. The following figure illustrates this concept for two of the indicators. Although there is a clear difference in the mean values between baseline and treatment, the relatively widely dispersed distributions and high standard deviation values suggest that the impact of the service is still uncertain.
In order to have more robust and meaningful evaluation results, a larger data sample and a more in-depth analysis of the data (e.g. filtering events by certain criteria, taking into consideration peak/off-peak traffic conditions, checking for incomplete events or errors in the log data etc.) is required. For further details on this please consult <add link to D6.4 (when it will be published)>.
You can download the evaluation data here.
Blind Spot Detection (BSD)
Emergency Vehicle Warning (EVW)
Flexible Infrastructure (FI)
Green Light Optimal Speed Advisory (GLOSA)
Green Priority (GP)
In-Vehicle Signage (IVS)
Motorcycle Approaching Indication (MAI)
Road Hazard Warning (RHW)
Road Works Working (RWW)
Signal Violation Warning (SVW)
Warning System for Pedestrian (WSP)
This website has received funding from the European Union’s Horizon 2020 Research and Innovation Programme
under Grant Agreement number 723311.