Cooperative Adaptive Cruise Control (CACC)
The objective of Cooperative Adaptive Cruise Control is to improve safety, comfort and traffic flow on intersections with Vehicle-to-Infrastructure communication between CACC and intersection traffic lights (or managed intersections).
Taking into account various stakeholders’ views, a list of business model blueprints that address current or future challenges of urban areas, together with their operating and value-capture scenarios depicting the inner-workings of the business models, and the exchange of costs-benefits among stakeholders, have been created for the Cooperative Adaptive Cruise Control service.
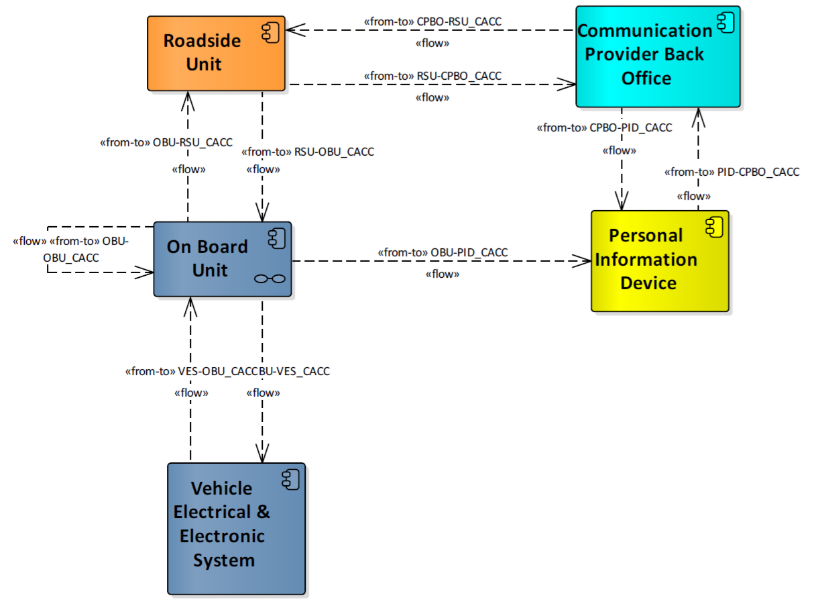
Detailed information about Cooperative Adaptive Cruise Control architecture can be found here.
Within the C-MobILE project the Cooperative Adaptive Cruise Control service is implemented in four Deployment Sites: Bordeaux, Newcastle, North Brabant, and Vigo.
In Bordeaux the CACC service is implemented as a proof of concept in a limited part of A63 highway. The services is based on ITS-G5 communication technology to enable trucks to exchange CAM messages and use CAN bus communication. By exchanging data via their OBU truck can adapt their respective speed and drive in platoon. The service provider for CACC is NeoGLS.
CACC in Newcastle is an extension to existing services under consideration by Newcastle City Council, linked to the GLOSA service already deployed, which informs a vehicle of the appropriate speed to drive at to allow preceding traffic to clear a green signal, thus reducing braking and acceleration and enabling further energy savings.
In North Brabant a proof of concept is developed using test vehicles from TNO with automated driving capability. The automated driving system connects to traffic lights to allow the vehicle negotiating with equipped traffic lights, including automated stopping for a red light. The concept is demonstrated in the city of Helmond.
In Vigo the CACC service is being experimented as a proof of concept at CTAG test track. Mutual vehicle-to-vehicle information exchange allow vehicles to adapt their speeds according to the info received from the other vehicles, obtaining a platoon effect.